Родионов В. Учиться у дельфинов
Освоение человеком Мирового океана невозможно без развития гидрогеологии, гидробиологии, других наук, в том числе гидроакустики, изучающей особенности распространения, отражения, затухания звуковых волн в реальной водной среде для целей подводной локации, связи, поиска затонувших объектов и т.д. При разработке такого рода аппаратуры конструкторы стремятся учитывать опыт живой природы, в частности эхолокационных систем, которыми обладают дельфины.
 Начальные шаги в этой области сделаны более четырех десятилетий назад. В 1964 г. в Ленинградском (ныне Санкт-Петербургском) университете по инициативе заведующего кафедрой высшей нервной деятельности, доктора биологических наук Эрванда Айрапетьянца и его ученика Алексея Константинова (впоследствии доктора биологических наук) была основана первая в нашей стране лаборатория биоакустики. Возможности естествоиспытателей резко расширились с созданием в 1965 г. военно-морского океанариума в черноморском городе Севастополе (ныне под юрисдикцией Украины). Наряду с опытами по применению морских млекопитающих в поисково-спасательных целях здесь исследовали широкий спектр научных проблем, в том числе способности животных ориентироваться в пространстве с помощью природного сонара (гидролокатора). Новое направление поддержали академики Аксель Берг (1893-1979) — специалист в области радиотехники и электроники, физик Леонид Бреховских (1917-2005), физиолог Павел Симонов (1926-2002), зоолог Владимир Соколов (1928-1998), член-корреспондент АН СССР, автор трудов по разработке автоматической и телемеханической аппаратуры Борис Сотсков (1908-1972) и др. К изучению китообразных подключились академические институты — Эволюционной физиологии и биохимии им. И.М. Сеченова (Ленинград), Проблем экологии и эволюции им. А.Н. Северцова и Океанологии им. П.П. Ширшова (Москва), Мурманский морской биологический, Тихоокеанский океанологический им. В.И. Ильичева (Владивосток), вузы (МГУ им. М.В. Ломоносова, Ленинградский государственный университет), отраслевые институты (Центральный научно-исследовательский «Морфизприбор» и Авиаприборостроения (Ленинград)), Акустический им. академика Н.Н. Андреева (Москва), Полярный институт морского рыбного хозяйства и океанографии (Мурманск) — всего более 50 организаций. Изыскания предвещали хорошие перспективы использования животных не только в военно-морских операциях, но и в гражданских целях.
Начальные шаги в этой области сделаны более четырех десятилетий назад. В 1964 г. в Ленинградском (ныне Санкт-Петербургском) университете по инициативе заведующего кафедрой высшей нервной деятельности, доктора биологических наук Эрванда Айрапетьянца и его ученика Алексея Константинова (впоследствии доктора биологических наук) была основана первая в нашей стране лаборатория биоакустики. Возможности естествоиспытателей резко расширились с созданием в 1965 г. военно-морского океанариума в черноморском городе Севастополе (ныне под юрисдикцией Украины). Наряду с опытами по применению морских млекопитающих в поисково-спасательных целях здесь исследовали широкий спектр научных проблем, в том числе способности животных ориентироваться в пространстве с помощью природного сонара (гидролокатора). Новое направление поддержали академики Аксель Берг (1893-1979) — специалист в области радиотехники и электроники, физик Леонид Бреховских (1917-2005), физиолог Павел Симонов (1926-2002), зоолог Владимир Соколов (1928-1998), член-корреспондент АН СССР, автор трудов по разработке автоматической и телемеханической аппаратуры Борис Сотсков (1908-1972) и др. К изучению китообразных подключились академические институты — Эволюционной физиологии и биохимии им. И.М. Сеченова (Ленинград), Проблем экологии и эволюции им. А.Н. Северцова и Океанологии им. П.П. Ширшова (Москва), Мурманский морской биологический, Тихоокеанский океанологический им. В.И. Ильичева (Владивосток), вузы (МГУ им. М.В. Ломоносова, Ленинградский государственный университет), отраслевые институты (Центральный научно-исследовательский «Морфизприбор» и Авиаприборостроения (Ленинград)), Акустический им. академика Н.Н. Андреева (Москва), Полярный институт морского рыбного хозяйства и океанографии (Мурманск) — всего более 50 организаций. Изыскания предвещали хорошие перспективы использования животных не только в военно-морских операциях, но и в гражданских целях.Пристальное внимание уделялось сенсорным особенностям дельфинов. Их оказалось немало. Зрение этих млекопитающих прекрасно адаптировано к подводному и надводному видению. Обладают они и обонянием. А, скажем, прокладывать путь из одного полушария в другое они способны по магнитно-силовым линиям Земли. В ходе эволюции у китообразных сформировалась совершенная система звуковых сигналов — с ее помощью они ориентируются в пространстве, добывают пищу, передают информацию друг другу.
Во время коллективной охоты дельфины легко определяют собственное пространственное положение по отношению к морской поверхности и относительно сородичей. Конечно, у них есть зрительная система, однако ночью она не эффективна, тем не менее животные, двигаясь в воде даже с большой скоростью, не сталкиваются. Каждый излучает эхолокационные импульсы, иначе рыбу не поймать, направляя сигналы так, чтобы не мешать друг другу. Стадо может быть очень большим, до сотни особей, но действуют они скоординированно.
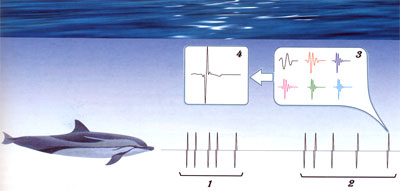
Эхолокация с помощью сверхширокополосных сигналов с нулевой "несущей":
1, 2 - интегральные сигналы с интервально-временным кодированием последовательности импульсов,
3 - спектрально-временное кодирование с помощью элементарных составляющих,
4 - результирующий эхолокационный импульс
Итак, в процессе эволюции природа позаботилась, чтобы у дельфинов сформировалось несколько одновременно работающих в звуковом канале систем: навигации, эхолокации и коммуникации. Именно систем, потому что сигналы они излучают с помощью специальных органов, играющих роль передающих антенн, а получают «послания» или же отраженные собственные импульсы на соответствующие приемники. Причем последовательности «излучение-прием» в их навигационном и эхолокационном аппарате должны иметь собственную синхронизацию, а вот коммуникативная система, как и у человека, временного согласования не требует. Чтобы не мешать сородичам, эхолокационные сигналы кодируются. Лишь так можно отличить отраженный от цели звук от собственных импульсов, т.е. у каждой особи есть свой декодер. И если у обитающих на суше млекопитающих приемником звуковой энергии служат уши, а определить ее направление помогают ушные раковины, то у морских животных подобного органа нет, зато есть другие, берущие эту функцию на себя.
Излучающая же система дельфинов включает в себя все известные на сегодня способы формирования акустического поля. Ныне построена достаточно правдоподобная ее схема, состоящая из «генератора» коротких импульсов («пневмопушки»), рефлектора и рефрактора. Принцип действия акустической пушки смоделирован в 80-х годах XX в. директором Акустического института, доктором физико-математических наук Николаем Дубровским и его ученицей, кандидатом физико-математических наук Людмилой Гиро. Эластичная трубка, имитирующая носовой проход животного, перекрывается посередине другой эластичной трубкой, выполняющей функцию сфинктера (мускульной пробки). Последняя при высоком давлении с одной стороны трубки кратковременно открывается и давление в обоих ее участках выравнивается. В результате формируется импульс акустического давления (не исключено, что подобных «генераторов» в излучающем аппарате морских млекопитающих может быть несколько).
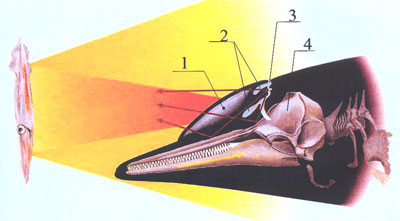
Эхолокационая система дельфина:
1 - акустическая линза, 2 - носовые мешки, 3 - дыхательный клапан, 4 - череп
Часть черепа играет роль сложного рефлектора. Окончательно же сигнал формируется в мелоне (акустической линзе) — он фокусирует звуковые колебания и согласовывает соответствующие характеристики антенны и воды. В лаборатории Института физиологии им. А.А. Ухтомского Санкт-Петербургского государственного университета, возглавляемой старшим научным сотрудником Юрием Иваненко, измерены биофизические характеристики этой линзы. Показано: ее параметры плавно меняются от центра к периферии, а на процесс формирования акустического поля влияют также и температурные градиенты. Подобрав полимеры, по физико-химическим особенностям сходные с мелоном, включая и возможность управления температурой от центра к периферии, ученый построил бионическую модель, близкую по показателям к акустической линзе дельфина. Предполагают, что четыре пары имеющихся в черепе «мешков» могут выполнять двоякую функцию: изменять геометрические размеры мелона и генерировать ультразвуковые колебания. В первом случае варьируется ширина поля излучения.
В ходе опытов по распознаванию морскими животными подводных объектов с помощью эхолокации выявлено: дельфин афалина обнаруживает цель на расстоянии до 700 м, белуха — до 2 км. Информационная емкость сигнала такова, что они безошибочно определяют стальные мишени, различающиеся по количественному содержанию углерода! Выяснена также их способность классифицировать объекты — они практически всегда находят необходимые для такой сложной операции признаки.
Очень подробно исследованы характеристики слуха дельфинов. В каком диапазоне они слышат? Как меняется чувствительность приемной системы в зависимости от частоты? Чтобы ответить на эти и другие вопросы, потребовалось создать новое инженерное оборудование. Например, в Ленинградском государственном университете сконструировали генераторы для получения сигналов с любым фронтом нарастания/спада амплитуды, автоматической регулировкой длительности, частоты заполнения и заданной характеристикой фазы.
По данным экспериментов кандидат биологических наук Владимир Чилингирис (Институт физиологии им. А.А. Ухтомского) выдвинул гипотезу: ультразвук во внутреннее ухо животного проходит по нижней челюсти. Это предположение позднее подтвердили другие специалисты.
При изучении эхолокационной системы дельфина обнаружено: он излучает сигналы и воспринимает их в огромной полосе частот — от 20 до 200 000 Гц (для сравнения: возможности человеческого слуха 20-20 000 Гц). Появление в середине 70-х годов XX в. аппаратуры, записывающей их сигналы без искажений, должно было помочь расшифровать столь далекий от человеческого язык. Но вскоре выяснилось: техника приема и передачи информации, построенная на узкополосных сигналах, для решения столь сложной задачи непригодна. В чем причина?
Как известно, радиосвязь осуществляется с помощью электромагнитных колебаний. Но волны низких (звуковых) частот сами по себе для этого непригодны, поскольку изменяются сравнительно медленно и почти не излучаются. Поэтому в качестве переносчика телеграфных сообщений, речи, музыки и т.д. используют своего рода транспортное средство — колебания высокой (в данном случае ее называют несущей) частоты. А в результате воздействия низкочастотных колебаний меняется характер и высокочастотных, т.е. один из параметров — амплитуда, частота или фаза, что называется модуляцией. Для передачи по радио- или акустическому каналу до недавнего времени чаще других применяли узкополосные сигналы с фиксированной «несущей», модулируя их по амплитуде. Скажем, по аналогии с роялем, играли на одной клавише, варьируя лишь силу нажатия на нее. Однако с развитием радиотехнических и гидроакустических систем было замечено: чем шире частотная полоса сигнала (по той же аналогии — быстрый перебор последовательности клавиш), тем выше помехоустойчивость связи. При такой модуляции частота меняется во времени. Звуковые же «послания» дельфина похожи на фортепьянный аккорд — в нем все частоты присутствуют одновременно, т.е. сигнал широкополосный и сосредоточен во времени.
При формировании электромагнитного или акустического импульса в пространстве выделяется период его нарастания (увеличения по амплитуде), потом следует установившийся колебательный процесс (несущая частота не меняется), а в дальнейшем сигнал убывает. Чем уже полоса пропускания передающей антенны, тем длиннее периоды нарастания и убывания, тем длиннее и устойчивее колебательный процесс, характеризующийся несущей частотой. Такого установившегося процесса в импульсах дельфина просто нет. Можно сказать, что он использует сигналы с нулевой «несущей». Добавим: система тем устойчивее к разного рода помехам, чем больше модуляций она использует. А дельфины применяют такое их количество, что сосчитать и исследовать все мы пока не в силах...
Полученные в опытах сигналы животных напоминали одиночную волну с полуволной сжатия и разряжения. Спектральная же характеристика импульса по акустической оси не имеет определенного максимума, но зависит от азимута. Первые экспериментальные данные показали: пространственная характеристика звукового поля дельфинов близка к предсказанной для широкополосных сигналов — отсутствуют боковые составляющие поля излучения, что уменьшает неоднозначность определения цели по угловым координатам. При усложнении задачи или ухудшении соотношения сигнал/помеха животные резко их усиливают (излучают пачки импульсов). С точки зрения теории сигналов они используют при этом интервально-временное кодирование.
Эксперименты по обнаружению дельфинами мин продемонстрировали феноменальные результаты. Из 100% скрытно установленных мин они находили... 105% («добавочными» оказались заиленные на глубине не менее 0,5 м, оставшиеся со времен Великой Отечественной войны 1941-1945 гг.). Это серьезный показатель работы сонара. О подобных характеристиках для технических систем пока остается только мечтать. А ведь этот уникальный результат прежде всего демонстрирует помехозащищенность широкополосных импульсов, излучаемых животными.
Следует отметить, сегодняшние требования к работе радиотехнического оснащения настолько высоки, что, используя лишь существующие узкополосные системы, решить задачи невозможно. Рассмотренный выше опыт показывает: будущее — за широкополосными устройствами, поскольку лишь на их основе возможно появление гидроакустических и радиотехнических систем с повышенной помехозащищенностью, скрытностью кодирования и скоростью передачи информации, сверхширокополосных антенн, приборов диагностики сред, медицинских томографов с улучшенной четкостью изображения и пониженной энергией излучения, новых технологий спутниковой навигации, радаров для бесконтактного обнаружения минных полей и т.д.
При проведении подводных работ военного или гражданского назначения возникает проблема построения навигационной системы позиционирования — аналогичной спутниковой GPS (GPS — система определения координат, созданная в США. Главный ее компонент — несколько десятков космических спутников, непрерывно передающих радиосигналы, создавая тем самым вокруг земного шара информационное поле. GPS-приемник улавливает их и, измеряя дальности до нескольких спутников, определяет координаты (прим. ред.)) только применяемые аппараты будут не летать по земной орбите, а... плавать на поверхности воды. Собственные координаты они станут автоматически определять по космической системе GPS и затем передавать их на устройство пользователя, находящегося под водой или даже на дне моря. Получая информацию от трех-четырех таких «спутников», подводники смогут точно определять собственное местонахождение. При этом система привычных для них сигналов фактически не изменится, обновятся лишь частота, на которой станут работать данные устройства, и кодирование.
Большинство современных систем радио- и гидролокации построены по резонансному типу. В качестве излучателя сигналов используют генератор и так называемый высокодобротный фильтр, в который входит антенна излучения. Приемник строится на том же фильтре, но уже с приемной антенной. Все дальнейшее селектирование полезного сигнала от шумов происходит в двух устройствах — обработки данных и принятия решения. Понятно, чем уже фильтр, тем меньше информации можно передать. С другой стороны, именно такой нужен для того, чтобы получить большую амплитуду сигнала, а чем больше она, тем дальше сигнал распространяется. Вот такой парадокс. Хочешь, чтобы дальше распространялся сигнал, задавай меньший диапазон модуляции, но тогда и меньше информации можно передать. Повышает информационную емкость сигнала применение не фиксированной «несущей», а изменяющейся плавно (частотная модуляция) или же резко, скачкообразно (частотная манипуляция). Впрочем, как мы уже говорили, диапазон этих изменений ограничен шириной высокодобротных фильтров.
Что касается эхолокационного сигнала дельфина, то он реализуется, как минимум, с помощью двух систем модуляции: импульсной, так как длительность сигнала меняется в зависимости от решаемой задачи, и частотной, поскольку диапазон изменения этого параметра лежит во всем «поле» слуховой системы. Импульсы могут быть длинными и очень короткими, вплоть до одного периода, а скорость варьирования частоты максимально возможной. Выделить «несущую» у таких невозможно, она «размазана» в спектральной области как в частотно-модулированных сигналах, длительность же их минимально возможная.
В начале 60-х годов XX в. американский ученый Хеннинг Хармут выдвинул идею системы передачи информации на основе сигналов без «несущей», что вызвало иронические комментарии многих специалистов, считавших невозможной техническую реализацию в пространстве подобных импульсов. Прошло время, и ныне широкополосные и сверхширокополосные сигналы, системы их обработки — наиболее популярная и востребованная область радиотехники.
Сконструировать излучающую систему для формирования в пространстве сигналов без «несущей» старались многие. Скажем, в отделе гидроакустики Севастопольского океанариума в 80-е годы XX в. пытались сделать это с помощью антенны на электрической искре (доктор технических наук Вячеслав Сапрыкин). Имеются конструктивные решения постройки широкополосных излучателей в диапазоне частот выше 1 МГц. При малых уровнях акустического давления уже созданы их аналоги до 1 МГц. Но сравнение сигналов, сформированных с помощью технических систем, с их аналогами у дельфинов показывает, насколько биологические технологии превосходят инженерную мысль. Тем не менее конструкторы не оставляют своих попыток. Наилучшие результаты в создании широкополосной антенны для формирования акустического импульса, близкого по параметрам к сигналу дельфина, достигнуты специалистами кафедры электроакустики Электротехнического института им. В.И.Ульянова (Ленина) в Санкт-Петербурге.
До сих пор остается актуальной задача обнаружения мин, прежде всего донных, нередко заиленных или даже погруженных в грунт. При этом корпуса современных изделий могут иметь антигидролокационное покрытие согласно рекомендациям технологии «стеллс». Сложность их обнаружения усугубляется необходимостью надежно классифицировать выявленный гидроакустический контакт. Сейчас дельфины справляются с этим лучше, чем самые передовые рукотворные системы, что подтверждает использование этих животных военно-морскими силами США в учениях и локальных войнах. С 2002 г. управление военно-морских исследований, подразделение космических и морских вооружений, комиссия управления перспективных военных научно-исследовательских и опытно-конструкторских работ Министерства обороны США финансируют проекты систем поиска и классификации заиленных донных мин на основе биосонара. Запланированы разработки автономных минисистем типа «робот-дельфин» и устройств на базе новых технологий с антеннами, использующими «дельфиноподобные» сигналы. Предполагают, что на основе последних удастся создать аппаратуру трехмерного видения.
Гидрокосмос при его освоении потребует очень больших усилий, а иметь оперативного помощника в чуждой для нас среде — не прихоть, а необходимость. Исследования морских млекопитающих, в физиологии и поведении которых еще так много непознанного, должны быть активно продолжены и в нашей стране.
Доктор технических наук Анатолий РОДИОНОВ, председатель Научного совета по проблемам прикладной гидрофизики Санкт-Петербургского научного центра РАН
"Наука в России", № 2, 2007





 Издательство «Свиньин и сыновья» выпустило несколько сотен самых разных по жанру, объему и авторам, но неизменно высококультурных изданий
Издательство «Свиньин и сыновья» выпустило несколько сотен самых разных по жанру, объему и авторам, но неизменно высококультурных изданий